|
WPILib 2012
WPILibRoboticsLibraryforFRC
|
|
WPILib 2012
WPILibRoboticsLibraryforFRC
|
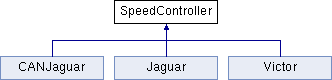
#include <SpeedController.h>
Public Member Functions | |
| virtual void | Set (float speed, UINT8 syncGroup=0)=0 |
| virtual float | Get ()=0 |
| virtual void | Disable ()=0 |
Interface for speed controlling devices.
| virtual void SpeedController::Disable | ( | ) | [pure virtual] |
| virtual float SpeedController::Get | ( | ) | [pure virtual] |
| virtual void SpeedController::Set | ( | float | speed, |
| UINT8 | syncGroup = 0 |
||
| ) | [pure virtual] |
 1.7.4
1.7.4

