|
WPILib 2012
WPILibRoboticsLibraryforFRC
|
|
WPILib 2012
WPILibRoboticsLibraryforFRC
|
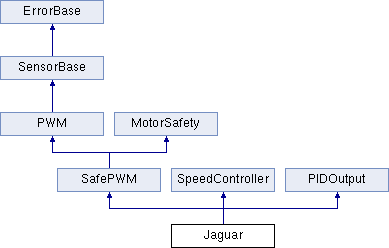
#include <Jaguar.h>
Public Member Functions | |
| Jaguar (UINT32 channel) | |
| Jaguar (UINT8 moduleNumber, UINT32 channel) | |
| virtual void | Set (float value, UINT8 syncGroup=0) |
| virtual float | Get () |
| virtual void | Disable () |
| virtual void | PIDWrite (float output) |
Luminary Micro Jaguar Speed Control
| Jaguar::Jaguar | ( | UINT32 | channel | ) | [explicit] |
| Jaguar::Jaguar | ( | UINT8 | moduleNumber, |
| UINT32 | channel | ||
| ) |
| void Jaguar::Disable | ( | ) | [virtual] |
Common interface for disabling a motor.
Implements SpeedController.
| float Jaguar::Get | ( | ) | [virtual] |
Get the recently set value of the PWM.
Implements SpeedController.
| void Jaguar::PIDWrite | ( | float | output | ) | [virtual] |
Write out the PID value as seen in the PIDOutput base object.
| output | Write out the PWM value as was found in the PIDController |
Implements PIDOutput.
| void Jaguar::Set | ( | float | speed, |
| UINT8 | syncGroup = 0 |
||
| ) | [virtual] |
Set the PWM value.
The PWM value is set using a range of -1.0 to 1.0, appropriately scaling the value for the FPGA.
| speed | The speed value between -1.0 and 1.0 to set. |
| syncGroup | Unused interface. |
Implements SpeedController.
 1.7.4
1.7.4

