|
| | GearTooth (uint32_t channel, bool directionSensitive=false) |
| |
| | GearTooth (uint8_t moduleNumber, uint32_t channel, bool directionSensitive=false) |
| |
| | GearTooth (DigitalSource *source, bool directionSensitive=false) |
| |
|
| GearTooth (DigitalSource &source, bool directionSensitive=false) |
| |
| virtual | ~GearTooth () |
| |
| void | EnableDirectionSensing (bool directionSensitive) |
| |
|
virtual std::string | GetSmartDashboardType () |
| |
| | Counter () |
| |
| | Counter (uint32_t channel) |
| |
| | Counter (uint8_t moduleNumber, uint32_t channel) |
| |
| | Counter (DigitalSource *source) |
| |
|
| Counter (DigitalSource &source) |
| |
| | Counter (AnalogTrigger *trigger) |
| |
|
| Counter (AnalogTrigger &trigger) |
| |
|
| Counter (EncodingType encodingType, DigitalSource *upSource, DigitalSource *downSource, bool inverted) |
| |
| virtual | ~Counter () |
| |
| void | SetUpSource (uint32_t channel) |
| |
| void | SetUpSource (uint8_t moduleNumber, uint32_t channel) |
| |
| void | SetUpSource (AnalogTrigger *analogTrigger, AnalogTriggerOutput::Type triggerType) |
| |
| void | SetUpSource (AnalogTrigger &analogTrigger, AnalogTriggerOutput::Type triggerType) |
| |
| void | SetUpSource (DigitalSource *source) |
| |
| void | SetUpSource (DigitalSource &source) |
| |
| void | SetUpSourceEdge (bool risingEdge, bool fallingEdge) |
| |
| void | ClearUpSource () |
| |
| void | SetDownSource (uint32_t channel) |
| |
| void | SetDownSource (uint8_t moduleNumber, uint32_t channel) |
| |
| void | SetDownSource (AnalogTrigger *analogTrigger, AnalogTriggerOutput::Type triggerType) |
| |
| void | SetDownSource (AnalogTrigger &analogTrigger, AnalogTriggerOutput::Type triggerType) |
| |
| void | SetDownSource (DigitalSource *source) |
| |
| void | SetDownSource (DigitalSource &source) |
| |
| void | SetDownSourceEdge (bool risingEdge, bool fallingEdge) |
| |
| void | ClearDownSource () |
| |
| void | SetUpDownCounterMode () |
| |
| void | SetExternalDirectionMode () |
| |
| void | SetSemiPeriodMode (bool highSemiPeriod) |
| |
| void | SetPulseLengthMode (float threshold) |
| |
| void | SetReverseDirection (bool reverseDirection) |
| |
| void | Start () |
| |
| int32_t | Get () |
| |
| void | Reset () |
| |
| void | Stop () |
| |
|
double | GetPeriod () |
| |
| void | SetMaxPeriod (double maxPeriod) |
| |
| void | SetUpdateWhenEmpty (bool enabled) |
| |
| bool | GetStopped () |
| |
| bool | GetDirection () |
| |
| void | SetSamplesToAverage (int samplesToAverage) |
| |
| int | GetSamplesToAverage () |
| |
|
uint32_t | GetIndex () |
| |
|
void | UpdateTable () |
| |
|
void | StartLiveWindowMode () |
| |
|
void | StopLiveWindowMode () |
| |
|
void | InitTable (ITable *subTable) |
| |
|
ITable * | GetTable () |
| |
| | SensorBase () |
| |
| virtual | ~SensorBase () |
| |
|
virtual Error & | GetError () |
| | Retrieve the current error. Get the current error information associated with this sensor.
|
| |
|
virtual const Error & | GetError () const |
| |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set error information associated with a C library call that set an error to the "errno" global variable. More...
|
| |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated from the nivision Imaq API. More...
|
| |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated with this sensor. More...
|
| |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated with this sensor. More...
|
| |
|
virtual void | CloneError (ErrorBase *rhs) const |
| |
|
virtual void | ClearError () const |
| | Clear the current error information associated with this sensor.
|
| |
| virtual bool | StatusIsFatal () const |
| | Check if the current error code represents a fatal error. More...
|
| |
|
| enum | Mode { kTwoPulse =0,
kSemiperiod =1,
kPulseLength =2,
kExternalDirection =3
} |
| |
| enum | EncodingType { k1X,
k2X,
k4X
} |
| |
| static void | DeleteSingletons () |
| |
|
static uint32_t | GetDefaultAnalogModule () |
| |
|
static uint32_t | GetDefaultDigitalModule () |
| |
|
static uint32_t | GetDefaultSolenoidModule () |
| |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| |
| static bool | CheckDigitalChannel (uint32_t channel) |
| |
| static bool | CheckRelayChannel (uint32_t channel) |
| |
| static bool | CheckPWMChannel (uint32_t channel) |
| |
| static bool | CheckAnalogChannel (uint32_t channel) |
| |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| |
|
static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| |
|
static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| |
| static Error & | GetGlobalError () |
| |
| void | AddToSingletonList () |
| |
|
| ErrorBase () |
| | Initialize the instance status to 0 for now.
|
| |
|
DigitalSource * | m_upSource |
| | What makes the counter count up.
|
| |
|
DigitalSource * | m_downSource |
| | What makes the counter count down.
|
| |
|
tCounter * | m_counter |
| | The FPGA counter object.
|
| |
|
Error | m_error |
| |
|
static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| |
|
static Error | _globalError |
| |
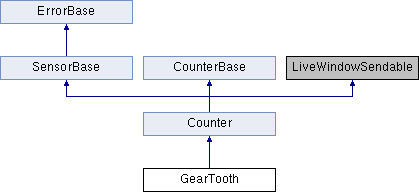
Alias for counter class. Implement the gear tooth sensor supplied by FIRST. Currently there is no reverse sensing on the gear tooth sensor, but in future versions we might implement the necessary timing in the FPGA to sense direction.
 Public Member Functions inherited from Counter
Public Member Functions inherited from Counter 1.8.5
1.8.5

