|
WPILib
2014.0
WPIRoboticsLibraryforFRC
|
|
WPILib
2014.0
WPIRoboticsLibraryforFRC
|
#include <Counter.h>
Public Types | |
| enum | Mode { kTwoPulse =0, kSemiperiod =1, kPulseLength =2, kExternalDirection =3 } |
 Public Types inherited from CounterBase Public Types inherited from CounterBase | |
| enum | EncodingType { k1X, k2X, k4X } |
Public Member Functions | |
| Counter () | |
| Counter (uint32_t channel) | |
| Counter (uint8_t moduleNumber, uint32_t channel) | |
| Counter (DigitalSource *source) | |
| Counter (DigitalSource &source) | |
| Counter (AnalogTrigger *trigger) | |
| Counter (AnalogTrigger &trigger) | |
| Counter (EncodingType encodingType, DigitalSource *upSource, DigitalSource *downSource, bool inverted) | |
| virtual | ~Counter () |
| void | SetUpSource (uint32_t channel) |
| void | SetUpSource (uint8_t moduleNumber, uint32_t channel) |
| void | SetUpSource (AnalogTrigger *analogTrigger, AnalogTriggerOutput::Type triggerType) |
| void | SetUpSource (AnalogTrigger &analogTrigger, AnalogTriggerOutput::Type triggerType) |
| void | SetUpSource (DigitalSource *source) |
| void | SetUpSource (DigitalSource &source) |
| void | SetUpSourceEdge (bool risingEdge, bool fallingEdge) |
| void | ClearUpSource () |
| void | SetDownSource (uint32_t channel) |
| void | SetDownSource (uint8_t moduleNumber, uint32_t channel) |
| void | SetDownSource (AnalogTrigger *analogTrigger, AnalogTriggerOutput::Type triggerType) |
| void | SetDownSource (AnalogTrigger &analogTrigger, AnalogTriggerOutput::Type triggerType) |
| void | SetDownSource (DigitalSource *source) |
| void | SetDownSource (DigitalSource &source) |
| void | SetDownSourceEdge (bool risingEdge, bool fallingEdge) |
| void | ClearDownSource () |
| void | SetUpDownCounterMode () |
| void | SetExternalDirectionMode () |
| void | SetSemiPeriodMode (bool highSemiPeriod) |
| void | SetPulseLengthMode (float threshold) |
| void | SetReverseDirection (bool reverseDirection) |
| void | Start () |
| int32_t | Get () |
| void | Reset () |
| void | Stop () |
| double | GetPeriod () |
| void | SetMaxPeriod (double maxPeriod) |
| void | SetUpdateWhenEmpty (bool enabled) |
| bool | GetStopped () |
| bool | GetDirection () |
| void | SetSamplesToAverage (int samplesToAverage) |
| int | GetSamplesToAverage () |
| uint32_t | GetIndex () |
| void | UpdateTable () |
| void | StartLiveWindowMode () |
| void | StopLiveWindowMode () |
| virtual std::string | GetSmartDashboardType () |
| void | InitTable (ITable *subTable) |
| ITable * | GetTable () |
| Public Member Functions inherited from SensorBase | |
| SensorBase () | |
| virtual | ~SensorBase () |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Protected Attributes | |
| DigitalSource * | m_upSource |
| What makes the counter count up. | |
| DigitalSource * | m_downSource |
| What makes the counter count down. | |
| tCounter * | m_counter |
| The FPGA counter object. | |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
Additional Inherited Members | |
| Static Public Member Functions inherited from SensorBase | |
| static void | DeleteSingletons () |
| static uint32_t | GetDefaultAnalogModule () |
| static uint32_t | GetDefaultDigitalModule () |
| static uint32_t | GetDefaultSolenoidModule () |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| static bool | CheckDigitalChannel (uint32_t channel) |
| static bool | CheckRelayChannel (uint32_t channel) |
| static bool | CheckPWMChannel (uint32_t channel) |
| static bool | CheckAnalogChannel (uint32_t channel) |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
| Static Public Attributes inherited from SensorBase | |
| static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| static const uint32_t | kDigitalChannels = 14 |
| static const uint32_t | kAnalogChannels = 8 |
| static const uint32_t | kAnalogModules = 2 |
| static const uint32_t | kDigitalModules = 2 |
| static const uint32_t | kSolenoidChannels = 8 |
| static const uint32_t | kSolenoidModules = 2 |
| static const uint32_t | kPwmChannels = 10 |
| static const uint32_t | kRelayChannels = 8 |
| static const uint32_t | kChassisSlots = 8 |
| Protected Member Functions inherited from SensorBase | |
| void | AddToSingletonList () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
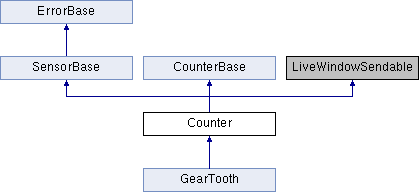
Class for counting the number of ticks on a digital input channel. This is a general purpose class for counting repetitive events. It can return the number of counts, the period of the most recent cycle, and detect when the signal being counted has stopped by supplying a maximum cycle time.
| Counter::Counter | ( | ) |
Create an instance of a counter where no sources are selected. Then they all must be selected by calling functions to specify the upsource and the downsource independently.
|
explicit |
Create an instance of a Counter object. Create an up-Counter instance given a channel. The default digital module is assumed.
| Counter::Counter | ( | uint8_t | moduleNumber, |
| uint32_t | channel | ||
| ) |
Create an instance of a Counter object. Create an instance of an up-Counter given a digital module and a channel.
| moduleNumber | The digital module (1 or 2). |
| channel | The channel in the digital module |
|
explicit |
Create an instance of a counter from a Digital Input. This is used if an existing digital input is to be shared by multiple other objects such as encoders.
|
explicit |
Create an instance of a Counter object. Create an instance of a simple up-Counter given an analog trigger. Use the trigger state output from the analog trigger.
|
virtual |
Delete the Counter object.
| void Counter::ClearDownSource | ( | ) |
Disable the down counting source to the counter.
| void Counter::ClearUpSource | ( | ) |
Disable the up counting source to the counter.
|
virtual |
Read the current counter value. Read the value at this instant. It may still be running, so it reflects the current value. Next time it is read, it might have a different value.
Implements CounterBase.
|
virtual |
The last direction the counter value changed.
Implements CounterBase.
| int Counter::GetSamplesToAverage | ( | ) |
Get the Samples to Average which specifies the number of samples of the timer to average when calculating the period. Perform averaging to account for mechanical imperfections or as oversampling to increase resolution.
|
virtual |
Determine if the clock is stopped. Determine if the clocked input is stopped based on the MaxPeriod value set using the SetMaxPeriod method. If the clock exceeds the MaxPeriod, then the device (and counter) are assumed to be stopped and it returns true.
Implements CounterBase.
|
virtual |
Reset the Counter to zero. Set the counter value to zero. This doesn't effect the running state of the counter, just sets the current value to zero.
Implements CounterBase.
| void Counter::SetDownSource | ( | uint32_t | channel | ) |
Set the down counting source to be a digital input channel. The slot will be set to the default digital module slot.
| void Counter::SetDownSource | ( | uint8_t | moduleNumber, |
| uint32_t | channel | ||
| ) |
Set the down counting source to be a digital input slot and channel.
| moduleNumber | The digital module (1 or 2). |
| channel | The digital channel (1..14). |
| void Counter::SetDownSource | ( | AnalogTrigger * | analogTrigger, |
| AnalogTriggerOutput::Type | triggerType | ||
| ) |
Set the down counting source to be an analog trigger.
| analogTrigger | The analog trigger object that is used for the Down Source |
| triggerType | The analog trigger output that will trigger the counter. |
| void Counter::SetDownSource | ( | AnalogTrigger & | analogTrigger, |
| AnalogTriggerOutput::Type | triggerType | ||
| ) |
Set the down counting source to be an analog trigger.
| analogTrigger | The analog trigger object that is used for the Down Source |
| triggerType | The analog trigger output that will trigger the counter. |
| void Counter::SetDownSource | ( | DigitalSource * | source | ) |
Set the source object that causes the counter to count down. Set the down counting DigitalSource.
| void Counter::SetDownSource | ( | DigitalSource & | source | ) |
Set the source object that causes the counter to count down. Set the down counting DigitalSource.
| void Counter::SetDownSourceEdge | ( | bool | risingEdge, |
| bool | fallingEdge | ||
| ) |
Set the edge sensitivity on a down counting source. Set the down source to either detect rising edges or falling edges.
| void Counter::SetExternalDirectionMode | ( | ) |
Set external direction mode on this counter. Counts are sourced on the Up counter input. The Down counter input represents the direction to count.
|
virtual |
Set the maximum period where the device is still considered "moving". Sets the maximum period where the device is considered moving. This value is used to determine the "stopped" state of the counter using the GetStopped method.
| maxPeriod | The maximum period where the counted device is considered moving in seconds. |
Implements CounterBase.
| void Counter::SetPulseLengthMode | ( | float | threshold | ) |
Configure the counter to count in up or down based on the length of the input pulse. This mode is most useful for direction sensitive gear tooth sensors.
| threshold | The pulse length beyond which the counter counts the opposite direction. Units are seconds. |
| void Counter::SetReverseDirection | ( | bool | reverseDirection | ) |
Set the Counter to return reversed sensing on the direction. This allows counters to change the direction they are counting in the case of 1X and 2X quadrature encoding only. Any other counter mode isn't supported.
| reverseDirection | true if the value counted should be negated. |
| void Counter::SetSamplesToAverage | ( | int | samplesToAverage | ) |
Set the Samples to Average which specifies the number of samples of the timer to average when calculating the period. Perform averaging to account for mechanical imperfections or as oversampling to increase resolution.
| samplesToAverage | The number of samples to average from 1 to 127. |
| void Counter::SetSemiPeriodMode | ( | bool | highSemiPeriod | ) |
Set Semi-period mode on this counter. Counts up on both rising and falling edges.
| void Counter::SetUpdateWhenEmpty | ( | bool | enabled | ) |
Select whether you want to continue updating the event timer output when there are no samples captured. The output of the event timer has a buffer of periods that are averaged and posted to a register on the FPGA. When the timer detects that the event source has stopped (based on the MaxPeriod) the buffer of samples to be averaged is emptied. If you enable the update when empty, you will be notified of the stopped source and the event time will report 0 samples. If you disable update when empty, the most recent average will remain on the output until a new sample is acquired. You will never see 0 samples output (except when there have been no events since an FPGA reset) and you will likely not see the stopped bit become true (since it is updated at the end of an average and there are no samples to average).
| void Counter::SetUpDownCounterMode | ( | ) |
Set standard up / down counting mode on this counter. Up and down counts are sourced independently from two inputs.
| void Counter::SetUpSource | ( | uint32_t | channel | ) |
Set the upsource for the counter as a digital input channel. The slot will be the default digital module slot.
| void Counter::SetUpSource | ( | uint8_t | moduleNumber, |
| uint32_t | channel | ||
| ) |
Set the up source for the counter as digital input channel and slot.
| moduleNumber | The digital module (1 or 2). |
| channel | The digital channel (1..14). |
| void Counter::SetUpSource | ( | AnalogTrigger * | analogTrigger, |
| AnalogTriggerOutput::Type | triggerType | ||
| ) |
Set the up counting source to be an analog trigger.
| analogTrigger | The analog trigger object that is used for the Up Source |
| triggerType | The analog trigger output that will trigger the counter. |
| void Counter::SetUpSource | ( | AnalogTrigger & | analogTrigger, |
| AnalogTriggerOutput::Type | triggerType | ||
| ) |
Set the up counting source to be an analog trigger.
| analogTrigger | The analog trigger object that is used for the Up Source |
| triggerType | The analog trigger output that will trigger the counter. |
| void Counter::SetUpSource | ( | DigitalSource * | source | ) |
Set the source object that causes the counter to count up. Set the up counting DigitalSource.
| void Counter::SetUpSource | ( | DigitalSource & | source | ) |
Set the source object that causes the counter to count up. Set the up counting DigitalSource.
| void Counter::SetUpSourceEdge | ( | bool | risingEdge, |
| bool | fallingEdge | ||
| ) |
Set the edge sensitivity on an up counting source. Set the up source to either detect rising edges or falling edges.
|
virtual |
Start the Counter counting. This enables the counter and it starts accumulating counts from the associated input channel. The counter value is not reset on starting, and still has the previous value.
Implements CounterBase.
|
virtual |
Stop the Counter. Stops the counting but doesn't effect the current value.
Implements CounterBase.
 1.8.5
1.8.5

