|
WPILib 2012
WPILibRoboticsLibraryforFRC
|
|
WPILib 2012
WPILibRoboticsLibraryforFRC
|
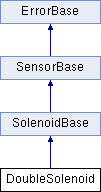
#include <DoubleSolenoid.h>
Public Types | |
| enum | Value { kOff, kForward, kReverse } |
Public Member Functions | |
| DoubleSolenoid (UINT32 forwardChannel, UINT32 reverseChannel) | |
| DoubleSolenoid (UINT8 moduleNumber, UINT32 forwardChannel, UINT32 reverseChannel) | |
| virtual | ~DoubleSolenoid () |
| virtual void | Set (Value value) |
| virtual Value | Get () |
DoubleSolenoid class for running 2 channels of high voltage Digital Output (9472 module).
The DoubleSolenoid class is typically used for pneumatics solenoids that have two positions controlled by two separate channels.
| DoubleSolenoid::DoubleSolenoid | ( | UINT32 | forwardChannel, |
| UINT32 | reverseChannel | ||
| ) | [explicit] |
Constructor.
| forwardChannel | The forward channel on the module to control. |
| reverseChannel | The reverse channel on the module to control. |
| DoubleSolenoid::DoubleSolenoid | ( | UINT8 | moduleNumber, |
| UINT32 | forwardChannel, | ||
| UINT32 | reverseChannel | ||
| ) |
Constructor.
| moduleNumber | The solenoid module (1 or 2). |
| forwardChannel | The forward channel on the module to control. |
| reverseChannel | The reverse channel on the module to control. |
| DoubleSolenoid::~DoubleSolenoid | ( | ) | [virtual] |
Destructor.
| DoubleSolenoid::Value DoubleSolenoid::Get | ( | ) | [virtual] |
Read the current value of the solenoid.
| void DoubleSolenoid::Set | ( | Value | value | ) | [virtual] |
Set the value of a solenoid.
| value | Move the solenoid to forward, reverse, or don't move it. |
 1.7.4
1.7.4

