|
WPILib 2012
WPILibRoboticsLibraryforFRC
|
|
WPILib 2012
WPILibRoboticsLibraryforFRC
|
#include <Accelerometer.h>
Public Member Functions | |
| Accelerometer (UINT32 channel) | |
| Accelerometer (UINT8 moduleNumber, UINT32 channel) | |
| Accelerometer (AnalogChannel *channel) | |
| virtual | ~Accelerometer () |
| float | GetAcceleration () |
| void | SetSensitivity (float sensitivity) |
| void | SetZero (float zero) |
| double | PIDGet () |
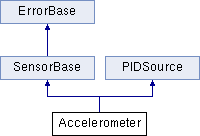
Handle operation of the accelerometer. The accelerometer reads acceleration directly through the sensor. Many sensors have multiple axis and can be treated as multiple devices. Each is calibrated by finding the center value over a period of time.
| Accelerometer::Accelerometer | ( | UINT32 | channel | ) | [explicit] |
Create a new instance of an accelerometer.
The accelerometer is assumed to be in the first analog module in the given analog channel. The constructor allocates desired analog channel.
| Accelerometer::Accelerometer | ( | UINT8 | moduleNumber, |
| UINT32 | channel | ||
| ) |
Create new instance of accelerometer.
Make a new instance of the accelerometer given a module and channel. The constructor allocates the desired analog channel from the specified module
| moduleNumber | The analog module (1 or 2). |
| channel | The analog channel (1..8) |
| Accelerometer::Accelerometer | ( | AnalogChannel * | channel | ) | [explicit] |
Create a new instance of Accelerometer from an existing AnalogChannel. Make a new instance of accelerometer given an AnalogChannel. This is particularly useful if the port is going to be read as an analog channel as well as through the Accelerometer class.
| Accelerometer::~Accelerometer | ( | ) | [virtual] |
Delete the analog components used for the accelerometer.
| float Accelerometer::GetAcceleration | ( | ) |
Return the acceleration in Gs.
The acceleration is returned units of Gs.
| double Accelerometer::PIDGet | ( | ) | [virtual] |
Get the Acceleration for the PID Source parent.
Implements PIDSource.
| void Accelerometer::SetSensitivity | ( | float | sensitivity | ) |
Set the accelerometer sensitivity.
This sets the sensitivity of the accelerometer used for calculating the acceleration. The sensitivity varys by accelerometer model. There are constants defined for various models.
| sensitivity | The sensitivity of accelerometer in Volts per G. |
| void Accelerometer::SetZero | ( | float | zero | ) |
Set the voltage that corresponds to 0 G.
The zero G voltage varys by accelerometer model. There are constants defined for various models.
| zero | The zero G voltage. |
 1.7.4
1.7.4

