|
|
| Encoder (uint32_t aChannel, uint32_t bChannel, bool reverseDirection=false, EncodingType encodingType=k4X) |
| |
|
| Encoder (uint8_t aModuleNumber, uint32_t aChannel, uint8_t bModuleNumber, uint32_t _bChannel, bool reverseDirection=false, EncodingType encodingType=k4X) |
| |
|
| Encoder (DigitalSource *aSource, DigitalSource *bSource, bool reverseDirection=false, EncodingType encodingType=k4X) |
| |
|
| Encoder (DigitalSource &aSource, DigitalSource &bSource, bool reverseDirection=false, EncodingType encodingType=k4X) |
| |
| virtual | ~Encoder () |
| |
| void | Start () |
| |
| int32_t | Get () |
| |
| int32_t | GetRaw () |
| |
| void | Reset () |
| |
| void | Stop () |
| |
| double | GetPeriod () |
| |
| void | SetMaxPeriod (double maxPeriod) |
| |
| bool | GetStopped () |
| |
| bool | GetDirection () |
| |
| double | GetDistance () |
| |
| double | GetRate () |
| |
| void | SetMinRate (double minRate) |
| |
| void | SetDistancePerPulse (double distancePerPulse) |
| |
| void | SetReverseDirection (bool reverseDirection) |
| |
| void | SetSamplesToAverage (int samplesToAverage) |
| |
| int | GetSamplesToAverage () |
| |
| void | SetPIDSourceParameter (PIDSourceParameter pidSource) |
| |
| double | PIDGet () |
| |
|
void | UpdateTable () |
| |
|
void | StartLiveWindowMode () |
| |
|
void | StopLiveWindowMode () |
| |
|
std::string | GetSmartDashboardType () |
| |
|
void | InitTable (ITable *subTable) |
| |
|
ITable * | GetTable () |
| |
| | SensorBase () |
| |
| virtual | ~SensorBase () |
| |
|
virtual Error & | GetError () |
| | Retrieve the current error. Get the current error information associated with this sensor.
|
| |
|
virtual const Error & | GetError () const |
| |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set error information associated with a C library call that set an error to the "errno" global variable. More...
|
| |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated from the nivision Imaq API. More...
|
| |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated with this sensor. More...
|
| |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated with this sensor. More...
|
| |
|
virtual void | CloneError (ErrorBase *rhs) const |
| |
|
virtual void | ClearError () const |
| | Clear the current error information associated with this sensor.
|
| |
| virtual bool | StatusIsFatal () const |
| | Check if the current error code represents a fatal error. More...
|
| |
|
| enum | EncodingType { k1X,
k2X,
k4X
} |
| |
| enum | PIDSourceParameter { kDistance,
kRate,
kAngle
} |
| |
| static void | DeleteSingletons () |
| |
|
static uint32_t | GetDefaultAnalogModule () |
| |
|
static uint32_t | GetDefaultDigitalModule () |
| |
|
static uint32_t | GetDefaultSolenoidModule () |
| |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| |
| static bool | CheckDigitalChannel (uint32_t channel) |
| |
| static bool | CheckRelayChannel (uint32_t channel) |
| |
| static bool | CheckPWMChannel (uint32_t channel) |
| |
| static bool | CheckAnalogChannel (uint32_t channel) |
| |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| |
|
static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| |
|
static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| |
| static Error & | GetGlobalError () |
| |
|
static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| |
|
static const uint32_t | kDigitalChannels = 14 |
| |
|
static const uint32_t | kAnalogChannels = 8 |
| |
|
static const uint32_t | kAnalogModules = 2 |
| |
|
static const uint32_t | kDigitalModules = 2 |
| |
|
static const uint32_t | kSolenoidChannels = 8 |
| |
|
static const uint32_t | kSolenoidModules = 2 |
| |
|
static const uint32_t | kPwmChannels = 10 |
| |
|
static const uint32_t | kRelayChannels = 8 |
| |
|
static const uint32_t | kChassisSlots = 8 |
| |
| void | AddToSingletonList () |
| |
|
| ErrorBase () |
| | Initialize the instance status to 0 for now.
|
| |
|
Error | m_error |
| |
|
static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| |
|
static Error | _globalError |
| |
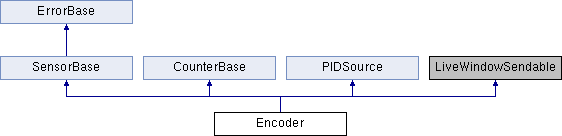
Class to read quad encoders. Quadrature encoders are devices that count shaft rotation and can sense direction. The output of the QuadEncoder class is an integer that can count either up or down, and can go negative for reverse direction counting. When creating QuadEncoders, a direction is supplied that changes the sense of the output to make code more readable if the encoder is mounted such that forward movement generates negative values. Quadrature encoders have two digital outputs, an A Channel and a B Channel that are out of phase with each other to allow the FPGA to do direction sensing.
 Public Member Functions inherited from SensorBase
Public Member Functions inherited from SensorBase 1.8.5
1.8.5

