|
| | SafePWM (uint32_t channel) |
| |
| | SafePWM (uint8_t moduleNumber, uint32_t channel) |
| |
|
void | SetExpiration (float timeout) |
| |
| float | GetExpiration () |
| |
| bool | IsAlive () |
| |
| void | StopMotor () |
| |
| bool | IsSafetyEnabled () |
| |
| void | SetSafetyEnabled (bool enabled) |
| |
|
void | GetDescription (char *desc) |
| |
| virtual void | SetSpeed (float speed) |
| |
| | PWM (uint32_t channel) |
| |
| | PWM (uint8_t moduleNumber, uint32_t channel) |
| |
| virtual | ~PWM () |
| |
| virtual void | SetRaw (uint8_t value) |
| |
| virtual uint8_t | GetRaw () |
| |
| void | SetPeriodMultiplier (PeriodMultiplier mult) |
| |
| void | EnableDeadbandElimination (bool eliminateDeadband) |
| |
| void | SetBounds (int32_t max, int32_t deadbandMax, int32_t center, int32_t deadbandMin, int32_t min) |
| |
| void | SetBounds (double max, double deadbandMax, double center, double deadbandMin, double min) |
| |
|
uint32_t | GetChannel () |
| |
|
uint32_t | GetModuleNumber () |
| |
| | SensorBase () |
| |
| virtual | ~SensorBase () |
| |
|
virtual Error & | GetError () |
| | Retrieve the current error. Get the current error information associated with this sensor.
|
| |
|
virtual const Error & | GetError () const |
| |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set error information associated with a C library call that set an error to the "errno" global variable. More...
|
| |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated from the nivision Imaq API. More...
|
| |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated with this sensor. More...
|
| |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated with this sensor. More...
|
| |
|
virtual void | CloneError (ErrorBase *rhs) const |
| |
|
virtual void | ClearError () const |
| | Clear the current error information associated with this sensor.
|
| |
| virtual bool | StatusIsFatal () const |
| | Check if the current error code represents a fatal error. More...
|
| |
|
| enum | PeriodMultiplier { kPeriodMultiplier_1X = 1,
kPeriodMultiplier_2X = 2,
kPeriodMultiplier_4X = 4
} |
| |
| static void | DeleteSingletons () |
| |
|
static uint32_t | GetDefaultAnalogModule () |
| |
|
static uint32_t | GetDefaultDigitalModule () |
| |
|
static uint32_t | GetDefaultSolenoidModule () |
| |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| |
| static bool | CheckDigitalChannel (uint32_t channel) |
| |
| static bool | CheckRelayChannel (uint32_t channel) |
| |
| static bool | CheckPWMChannel (uint32_t channel) |
| |
| static bool | CheckAnalogChannel (uint32_t channel) |
| |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| |
|
static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| |
|
static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| |
| static Error & | GetGlobalError () |
| |
|
static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| |
|
static const uint32_t | kDigitalChannels = 14 |
| |
|
static const uint32_t | kAnalogChannels = 8 |
| |
|
static const uint32_t | kAnalogModules = 2 |
| |
|
static const uint32_t | kDigitalModules = 2 |
| |
|
static const uint32_t | kSolenoidChannels = 8 |
| |
|
static const uint32_t | kSolenoidModules = 2 |
| |
|
static const uint32_t | kPwmChannels = 10 |
| |
|
static const uint32_t | kRelayChannels = 8 |
| |
|
static const uint32_t | kChassisSlots = 8 |
| |
| virtual void | SetPosition (float pos) |
| |
| virtual float | GetPosition () |
| |
| virtual float | GetSpeed () |
| |
|
void | ValueChanged (ITable *source, const std::string &key, EntryValue value, bool isNew) |
| |
|
void | UpdateTable () |
| |
|
void | StartLiveWindowMode () |
| |
|
void | StopLiveWindowMode () |
| |
|
std::string | GetSmartDashboardType () |
| |
|
void | InitTable (ITable *subTable) |
| |
|
ITable * | GetTable () |
| |
| void | AddToSingletonList () |
| |
|
| ErrorBase () |
| | Initialize the instance status to 0 for now.
|
| |
|
bool | m_eliminateDeadband |
| |
|
int32_t | m_maxPwm |
| |
|
int32_t | m_deadbandMaxPwm |
| |
|
int32_t | m_centerPwm |
| |
|
int32_t | m_deadbandMinPwm |
| |
|
int32_t | m_minPwm |
| |
|
ITable * | m_table |
| |
|
Error | m_error |
| |
| static constexpr float | kDefaultPwmPeriod = 5.05 |
| |
| static constexpr float | kDefaultPwmCenter = 1.5 |
| |
| static const int32_t | kDefaultPwmStepsDown = 128 |
| |
|
static const int32_t | kPwmDisabled = 0 |
| |
|
static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| |
|
static Error | _globalError |
| |
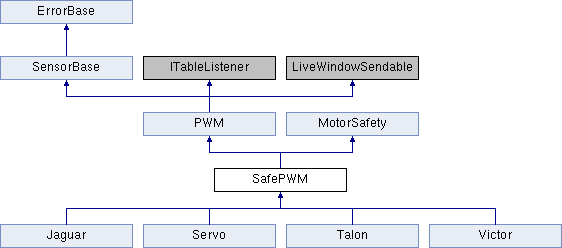
A safe version of the PWM class. It is safe because it implements the MotorSafety interface that provides timeouts in the event that the motor value is not updated before the expiration time. This delegates the actual work to a MotorSafetyHelper object that is used for all objects that implement MotorSafety.
 Public Member Functions inherited from PWM
Public Member Functions inherited from PWM 1.8.5
1.8.5

