|
WPILib
2014.0
WPIRoboticsLibraryforFRC
|
|
WPILib
2014.0
WPIRoboticsLibraryforFRC
|
#include <Compressor.h>
Public Member Functions | |
| Compressor (uint32_t pressureSwitchChannel, uint32_t compressorRelayChannel) | |
| Compressor (uint8_t pressureSwitchModuleNumber, uint32_t pressureSwitchChannel, uint8_t compresssorRelayModuleNumber, uint32_t compressorRelayChannel) | |
| ~Compressor () | |
| void | Start () |
| void | Stop () |
| bool | Enabled () |
| uint32_t | GetPressureSwitchValue () |
| void | SetRelayValue (Relay::Value relayValue) |
| void | UpdateTable () |
| void | StartLiveWindowMode () |
| void | StopLiveWindowMode () |
| std::string | GetSmartDashboardType () |
| void | InitTable (ITable *subTable) |
| ITable * | GetTable () |
 Public Member Functions inherited from SensorBase Public Member Functions inherited from SensorBase | |
| SensorBase () | |
| virtual | ~SensorBase () |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from SensorBase | |
| static void | DeleteSingletons () |
| static uint32_t | GetDefaultAnalogModule () |
| static uint32_t | GetDefaultDigitalModule () |
| static uint32_t | GetDefaultSolenoidModule () |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| static bool | CheckDigitalChannel (uint32_t channel) |
| static bool | CheckRelayChannel (uint32_t channel) |
| static bool | CheckPWMChannel (uint32_t channel) |
| static bool | CheckAnalogChannel (uint32_t channel) |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
| Static Public Attributes inherited from SensorBase | |
| static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| static const uint32_t | kDigitalChannels = 14 |
| static const uint32_t | kAnalogChannels = 8 |
| static const uint32_t | kAnalogModules = 2 |
| static const uint32_t | kDigitalModules = 2 |
| static const uint32_t | kSolenoidChannels = 8 |
| static const uint32_t | kSolenoidModules = 2 |
| static const uint32_t | kPwmChannels = 10 |
| static const uint32_t | kRelayChannels = 8 |
| static const uint32_t | kChassisSlots = 8 |
| Protected Member Functions inherited from SensorBase | |
| void | AddToSingletonList () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
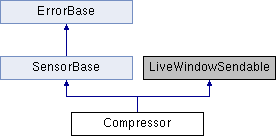
Compressor object. The Compressor object is designed to handle the operation of the compressor, pressure sensor and relay for a FIRST robot pneumatics system. The Compressor object starts a task which runs in the backround and periodically polls the pressure sensor and operates the relay that controls the compressor.
| Compressor::Compressor | ( | uint32_t | pressureSwitchChannel, |
| uint32_t | compressorRelayChannel | ||
| ) |
Compressor constructor. Given a relay channel and pressure switch channel (both in the default digital module), initialize the Compressor object.
You MUST start the compressor by calling the Start() method.
| pressureSwitchChannel | The GPIO channel that the pressure switch is attached to. |
| compressorRelayChannel | The relay channel that the compressor relay is attached to. |
| Compressor::Compressor | ( | uint8_t | pressureSwitchModuleNumber, |
| uint32_t | pressureSwitchChannel, | ||
| uint8_t | compresssorRelayModuleNumber, | ||
| uint32_t | compressorRelayChannel | ||
| ) |
Compressor constructor. Given a fully specified relay channel and pressure switch channel, initialize the Compressor object.
You MUST start the compressor by calling the Start() method.
| pressureSwitchModuleNumber | The digital module that the pressure switch is attached to. |
| pressureSwitchChannel | The GPIO channel that the pressure switch is attached to. |
| compresssorRelayModuleNumber | The digital module that the compressor relay is attached to. |
| compressorRelayChannel | The relay channel that the compressor relay is attached to. |
| Compressor::~Compressor | ( | ) |
Delete the Compressor object. Delete the allocated resources for the compressor and kill the compressor task that is polling the pressure switch.
| bool Compressor::Enabled | ( | ) |
Get the state of the enabled flag. Return the state of the enabled flag for the compressor and pressure switch combination.
| uint32_t Compressor::GetPressureSwitchValue | ( | ) |
Get the pressure switch value. Read the pressure switch digital input.
| void Compressor::SetRelayValue | ( | Relay::Value | relayValue | ) |
Operate the relay for the compressor. Change the value of the relay output that is connected to the compressor motor. This is only intended to be called by the internal polling thread.
| void Compressor::Start | ( | ) |
Start the compressor. This method will allow the polling loop to actually operate the compressor. The is stopped by default and won't operate until starting it.
| void Compressor::Stop | ( | ) |
Stop the compressor. This method will stop the compressor from turning on.
 1.8.5
1.8.5

