|
| | DigitalOutput (uint32_t channel) |
| |
| | DigitalOutput (uint8_t moduleNumber, uint32_t channel) |
| |
| virtual | ~DigitalOutput () |
| |
| void | Set (uint32_t value) |
| |
| uint32_t | GetChannel () |
| |
| void | Pulse (float length) |
| |
| bool | IsPulsing () |
| |
| void | SetPWMRate (float rate) |
| |
| void | EnablePWM (float initialDutyCycle) |
| |
| void | DisablePWM () |
| |
| void | UpdateDutyCycle (float dutyCycle) |
| |
| virtual uint32_t | GetChannelForRouting () |
| |
| virtual uint32_t | GetModuleForRouting () |
| |
| virtual bool | GetAnalogTriggerForRouting () |
| |
| virtual void | RequestInterrupts (tInterruptHandler handler, void *param) |
| |
| virtual void | RequestInterrupts () |
| |
|
void | SetUpSourceEdge (bool risingEdge, bool fallingEdge) |
| |
|
virtual void | ValueChanged (ITable *source, const std::string &key, EntryValue value, bool isNew) |
| |
|
void | UpdateTable () |
| |
|
void | StartLiveWindowMode () |
| |
|
void | StopLiveWindowMode () |
| |
|
std::string | GetSmartDashboardType () |
| |
|
void | InitTable (ITable *subTable) |
| |
|
ITable * | GetTable () |
| |
| virtual | ~DigitalSource () |
| |
| virtual void | CancelInterrupts () |
| | Free up the underlying chipobject functions. More...
|
| |
| virtual void | WaitForInterrupt (float timeout) |
| | Synchronus version. More...
|
| |
| virtual void | EnableInterrupts () |
| | Enable interrupts - after finishing setup. More...
|
| |
| virtual void | DisableInterrupts () |
| | Disable, but don't deallocate. More...
|
| |
| virtual double | ReadInterruptTimestamp () |
| | Return the timestamp for the interrupt that occurred. More...
|
| |
| | SensorBase () |
| |
| virtual | ~SensorBase () |
| |
|
virtual Error & | GetError () |
| | Retrieve the current error. Get the current error information associated with this sensor.
|
| |
|
virtual const Error & | GetError () const |
| |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set error information associated with a C library call that set an error to the "errno" global variable. More...
|
| |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated from the nivision Imaq API. More...
|
| |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated with this sensor. More...
|
| |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated with this sensor. More...
|
| |
|
virtual void | CloneError (ErrorBase *rhs) const |
| |
|
virtual void | ClearError () const |
| | Clear the current error information associated with this sensor.
|
| |
| virtual bool | StatusIsFatal () const |
| | Check if the current error code represents a fatal error. More...
|
| |
|
| static void | DeleteSingletons () |
| |
|
static uint32_t | GetDefaultAnalogModule () |
| |
|
static uint32_t | GetDefaultDigitalModule () |
| |
|
static uint32_t | GetDefaultSolenoidModule () |
| |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| |
| static bool | CheckDigitalChannel (uint32_t channel) |
| |
| static bool | CheckRelayChannel (uint32_t channel) |
| |
| static bool | CheckPWMChannel (uint32_t channel) |
| |
| static bool | CheckAnalogChannel (uint32_t channel) |
| |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| |
|
static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| |
|
static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| |
| static Error & | GetGlobalError () |
| |
|
static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| |
|
static const uint32_t | kDigitalChannels = 14 |
| |
|
static const uint32_t | kAnalogChannels = 8 |
| |
|
static const uint32_t | kAnalogModules = 2 |
| |
|
static const uint32_t | kDigitalModules = 2 |
| |
|
static const uint32_t | kSolenoidChannels = 8 |
| |
|
static const uint32_t | kSolenoidModules = 2 |
| |
|
static const uint32_t | kPwmChannels = 10 |
| |
|
static const uint32_t | kRelayChannels = 8 |
| |
|
static const uint32_t | kChassisSlots = 8 |
| |
|
void | AllocateInterrupts (bool watcher) |
| |
| void | AddToSingletonList () |
| |
|
| ErrorBase () |
| | Initialize the instance status to 0 for now.
|
| |
|
tInterrupt * | m_interrupt |
| |
|
tInterruptManager * | m_manager |
| |
|
uint32_t | m_interruptIndex |
| |
|
Error | m_error |
| |
|
static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| |
|
static Error | _globalError |
| |
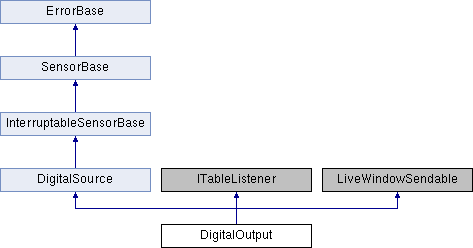
Class to write to digital outputs. Write values to the digital output channels. Other devices implemented elsewhere will allocate channels automatically so for those devices it shouldn't be done here.
| void DigitalOutput::EnablePWM |
( |
float |
initialDutyCycle | ) |
|
Enable a PWM Output on this line.
Allocate one of the 4 DO PWM generator resources from this module.
Supply the initial duty-cycle to output so as to avoid a glitch when first starting.
The resolution of the duty cycle is 8-bit for low frequencies (1kHz or less) but is reduced the higher the frequency of the PWM signal is.
- Parameters
-
| initialDutyCycle | The duty-cycle to start generating. [0..1] |
 Public Member Functions inherited from DigitalSource
Public Member Functions inherited from DigitalSource 1.8.5
1.8.5

