|
| | DigitalInput (uint32_t channel) |
| |
| | DigitalInput (uint8_t moduleNumber, uint32_t channel) |
| |
| virtual | ~DigitalInput () |
| |
|
uint32_t | Get () |
| |
| uint32_t | GetChannel () |
| |
| virtual uint32_t | GetChannelForRouting () |
| |
| virtual uint32_t | GetModuleForRouting () |
| |
| virtual bool | GetAnalogTriggerForRouting () |
| |
| virtual void | RequestInterrupts (tInterruptHandler handler, void *param=NULL) |
| | Asynchronus handler version. More...
|
| |
| virtual void | RequestInterrupts () |
| | Synchronus Wait version. More...
|
| |
|
void | SetUpSourceEdge (bool risingEdge, bool fallingEdge) |
| |
|
void | UpdateTable () |
| |
|
void | StartLiveWindowMode () |
| |
|
void | StopLiveWindowMode () |
| |
|
std::string | GetSmartDashboardType () |
| |
|
void | InitTable (ITable *subTable) |
| |
|
ITable * | GetTable () |
| |
| virtual | ~DigitalSource () |
| |
| virtual void | CancelInterrupts () |
| | Free up the underlying chipobject functions. More...
|
| |
| virtual void | WaitForInterrupt (float timeout) |
| | Synchronus version. More...
|
| |
| virtual void | EnableInterrupts () |
| | Enable interrupts - after finishing setup. More...
|
| |
| virtual void | DisableInterrupts () |
| | Disable, but don't deallocate. More...
|
| |
| virtual double | ReadInterruptTimestamp () |
| | Return the timestamp for the interrupt that occurred. More...
|
| |
| | SensorBase () |
| |
| virtual | ~SensorBase () |
| |
|
virtual Error & | GetError () |
| | Retrieve the current error. Get the current error information associated with this sensor.
|
| |
|
virtual const Error & | GetError () const |
| |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set error information associated with a C library call that set an error to the "errno" global variable. More...
|
| |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated from the nivision Imaq API. More...
|
| |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated with this sensor. More...
|
| |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| | Set the current error information associated with this sensor. More...
|
| |
|
virtual void | CloneError (ErrorBase *rhs) const |
| |
|
virtual void | ClearError () const |
| | Clear the current error information associated with this sensor.
|
| |
| virtual bool | StatusIsFatal () const |
| | Check if the current error code represents a fatal error. More...
|
| |
|
| static void | DeleteSingletons () |
| |
|
static uint32_t | GetDefaultAnalogModule () |
| |
|
static uint32_t | GetDefaultDigitalModule () |
| |
|
static uint32_t | GetDefaultSolenoidModule () |
| |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| |
| static bool | CheckDigitalChannel (uint32_t channel) |
| |
| static bool | CheckRelayChannel (uint32_t channel) |
| |
| static bool | CheckPWMChannel (uint32_t channel) |
| |
| static bool | CheckAnalogChannel (uint32_t channel) |
| |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| |
|
static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| |
|
static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| |
| static Error & | GetGlobalError () |
| |
|
static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| |
|
static const uint32_t | kDigitalChannels = 14 |
| |
|
static const uint32_t | kAnalogChannels = 8 |
| |
|
static const uint32_t | kAnalogModules = 2 |
| |
|
static const uint32_t | kDigitalModules = 2 |
| |
|
static const uint32_t | kSolenoidChannels = 8 |
| |
|
static const uint32_t | kSolenoidModules = 2 |
| |
|
static const uint32_t | kPwmChannels = 10 |
| |
|
static const uint32_t | kRelayChannels = 8 |
| |
|
static const uint32_t | kChassisSlots = 8 |
| |
|
void | AllocateInterrupts (bool watcher) |
| |
| void | AddToSingletonList () |
| |
|
| ErrorBase () |
| | Initialize the instance status to 0 for now.
|
| |
|
tInterrupt * | m_interrupt |
| |
|
tInterruptManager * | m_manager |
| |
|
uint32_t | m_interruptIndex |
| |
|
Error | m_error |
| |
|
static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| |
|
static Error | _globalError |
| |
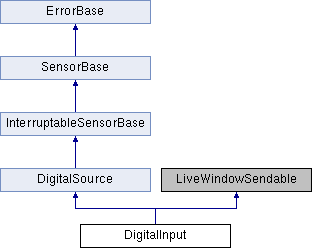
Class to read a digital input. This class will read digital inputs and return the current value on the channel. Other devices such as encoders, gear tooth sensors, etc. that are implemented elsewhere will automatically allocate digital inputs and outputs as required. This class is only for devices like switches etc. that aren't implemented anywhere else.
 Public Member Functions inherited from DigitalSource
Public Member Functions inherited from DigitalSource 1.8.5
1.8.5

